引言
随着城市和城区人口密度不断增加,车辆保有量持续增长,现有的停车基础设施已难以跟上需求增长的步伐。人工停车管理常常导致空置车位无人监管,运营商错失收入机会,驾驶员体验不佳。
尽管基于摄像头的技术解决方案已被广泛采用,但在光线不足、雨天或部分遮挡等实际应用环境中,其性能往往不尽如人意。此外,这些方案还伴随着高昂的安装和维护成本,尤其是在大型或多层停车场。
基于激光雷达(LiDAR)的智能停车系统正作为一种更卓越的替代方案迅速崛起,它具有更高的可靠性、更低的维护成本和更强的可扩展性,最终降低总体拥有成本。在本案例研究中,我们将介绍 MulticoreWare 如何与一家领先的 3D 传感技术客户合作,设计并实施基于激光雷达的停车管理解决方案,从而为城市停车基础设施的现代化改造提供技术稳健且可扩展的方法。
客户
该客户是领先的先进 3D 传感硬件和基础设施解决方案提供商。其产品组合涵盖智能交通、工业自动化和智能基础设施系统,利用先进的光学和激光雷达传感技术提供精准的上下文感知。
挑战
城市和商业停车场面临着诸多挑战,例如:
- 人工监管效率低下,导致车位利用率不足,运营成本增加。
- 缺乏实时车辆跟踪和占用情况信息,导致可视性有限,响应速度缓慢。
- 过度依赖摄像头解决方案,导致隐私问题和性能限制。
- 与移动应用、网页控制面板和执法系统缺乏无缝集成,阻碍了自动化进程,并降低了整体用户体验。
客户希望实施一套基于激光雷达(LiDAR)的自动化、可扩展且模块化的停车管理系统(PMS),以提供实时车辆检测、动态占用情况映射和API集成,从而实现无缝执法和数据分析。
MulticoreWare解决方案概述
1. 基于ROS 2的模块化架构
我们构建了基于ROS 2的Humble节点,用于预处理、滤波、聚类和跟踪。在目标硬件上,该数据处理流水线可维持10 Hz的端到端处理性能,并支持以10 Hz速率采集激光雷达点云数据。该设计可扩展至多个激光雷达,并可在≤10秒内完成热重启。
2. 传感器融合与滤波
我们对多个3D激光雷达进行了校准和同步,以提供全面的覆盖范围,外参标定残差(平移误差≤3 cm,旋转误差≤0.5°),以及≤5 ms的时间同步偏差。自动地面检测功能可实现≤0.5°的倾斜补偿残差。只有位于已配置的感兴趣区域(ROI)内的点才会被转发至聚类和检测。
3. 面向工控机实时部署的智能算法设计
MCW开发了一种定制算法,该算法在一个模块化、可扩展的框架内利用了基于位置的几何特征。这种设计使其能够无缝扩展并集成传感器融合,从而提高在复杂环境中的可靠性。当停车位蓝图或类似的先验信息可用时,该算法可以利用这些信息进一步提高复杂布局(倾斜、平行、垂直)的精度。它经过精心优化,可在工业PC上高效实时运行。
4. 云集成
PMS通过安全的HTTPS协议将停车状态和车辆事件发布到云端,从而为所有站点的每个车位生成实时动态视图。在云端,每个停车位的实时模型为应用程序、仪表板和第三方提供REST和WebSocket端点支持。
有效载荷(示例):
{
“row_ID: “2009”
"lot": "T1",
"slot": "A-17",
“slot_coordinates: [18.95, -25.91], [-11.30, -25.45], [-12.22, -4.33], [26.23, 6.74]”
"status": "occupied",
"event_id": "v13s12k1988-504",
"t_enter": "2025-09-21T12:34:56Z",
"confidence": 0.97
}
5. 可视化和调试工具
基于 Qt 的用户界面以 10 FPS 的帧率实时监控 LiDAR 点云、检测到的车辆位置以及所有车位的实时占用情况,并提供基于时间的分析与记录功能。该工具支持 10 Hz 的回放,并以独立的.deb软件包形式提供,从而实现快速部署。
业务影响
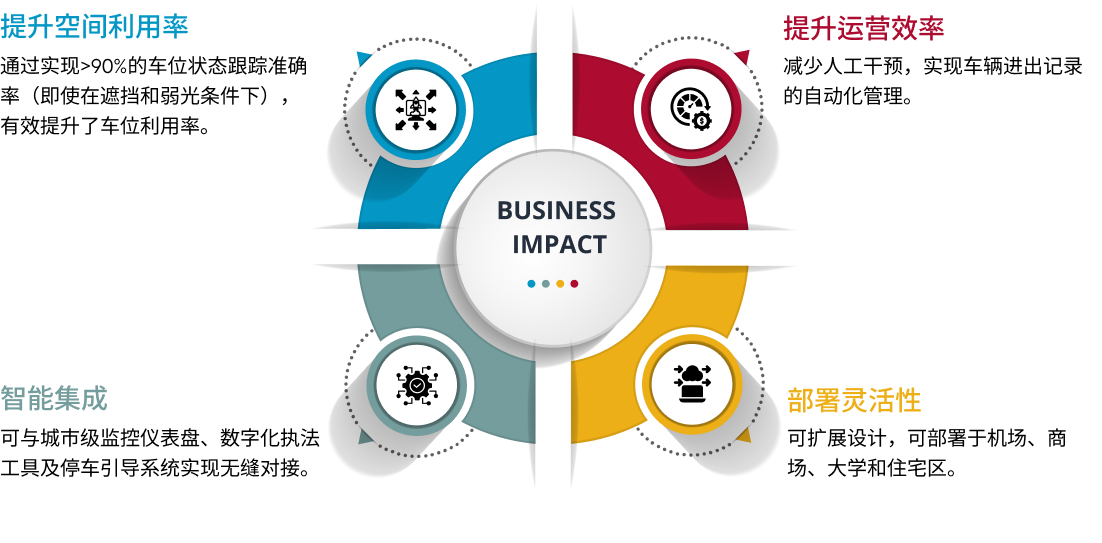
凭借在人工智能和传感器融合领域的深厚专业知识,MulticoreWare 可定制设计端到端解决方案,并针对实时嵌入式部署进行优化
如需了解 MulticoreWare 如何利用先进的人工智能和传感技术帮助您构建定制化的智能交通解决方案,请联系 info@multicorewareinc.com