May 13, 2026
客户
一家领先的无人机与机器人公司,致力于开发高性 能无人机平台,用于复杂或受限环境中的自主作业、工业检测及测绘。
问题陈述
随着无人机平台的演进,出现了两个主要挑战,这些挑战影响了系统的性能和可扩展性。
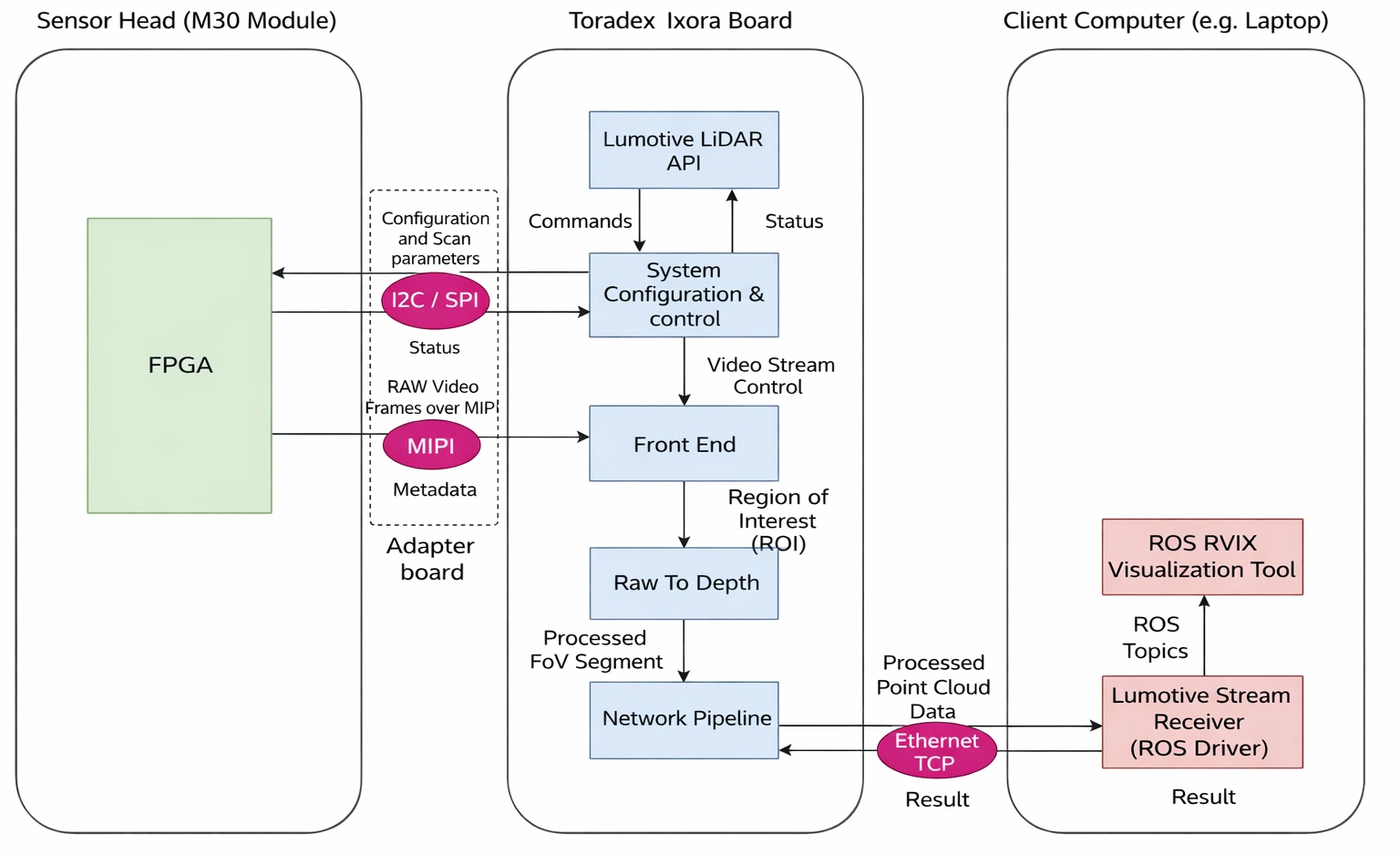
挑战 1:高速传感器集成
该无人机需要配备高速激光雷达模块以实现实时感知与导航。传感器的集成带来了硬件和软件兼容性方面的挑战。团队需要稳定的 90 FPS 帧率捕获、针对驱动程序适配的嵌入式 Linux 支持,以及可靠的设备树覆盖。这些能力对于在狭窄或动态环境中安全导航至关重要。
挑战 2:高级电机通信
该平台需要精确的多通道电机控制。PX4 固件更新启用了 DSHOT 协议和 3D 模式,而 STM32 固件则模拟了 VOXL IO 适配器功能,以实现多通道 ESC信号传输。这确保了电机响应迅速且无人机飞行性能稳定,支持在复杂的操作场景中进行敏捷机动。
解决方案概述
M30 传感器集成
- 在嵌入式 Linux 构建中添加并配置了 M30 激光雷达驱动程序,以确保传感器可靠运行。
- 配置了设备树叠加层,以保持向导航系统传输帧数据的连续性。
- 实现了稳定的 90 FPS 帧捕获,为实时自主导航提供输入感知流水线。
- 优化处理,以维持整体平台效率.
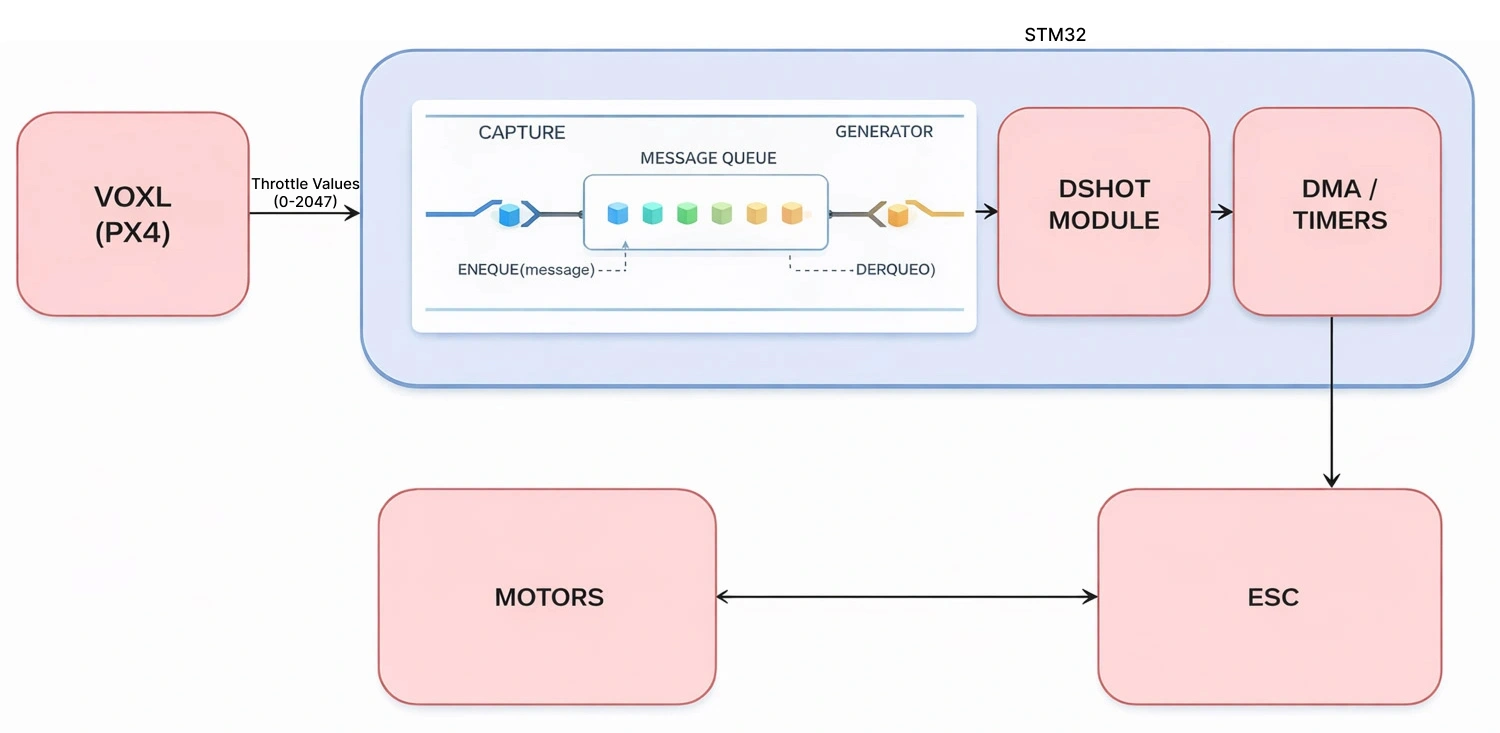
DSHOT 电机通信功能实现
- 更新了 PX4 固件,以支持 DSHOT 协议和 3D 模 式。
- 开发了 STM32 固件,用于模拟 VOXL IO 适配器 功能,从而实现精确的多通道电调控制。.
- 优化了固件与平台的集成,确保飞行稳定且响应 灵敏。.
- 验证了端到端的电机运行,以支持无人机安全、 敏捷的机动操作。.
业务影响
该解决方案使该公司能够在复杂环境中提升实时感知和导航能力。电机响应速度和飞行稳定性均得到改善,同时平台架构得以简化,减少了对额外I/O硬件的依赖。这些改进共同打造了一个可扩展且可靠的无人机平台,为下一代自主和工业运营提供了支持。
核心能力与成果
- 嵌入式系统优化: 对软硬件进行调优,以实现高性能和最低延迟,确保无人机可靠运行。
- 高速传感器集成 提供实时感知能力,实现狭窄或动态空间内的精准导航。
- 多通道电机控制: 确保电机运行精准灵敏,保障无人机飞行稳定。
- 可扩展平台架构: 简化的系统设计为未来无人机升级提供支持。
- 协同工程: 与客户的紧密合作确保了顺畅的集成与持续的验证
结论
该无人机平台实现了增强的感知能力和精准的飞行控制,MCW 通过嵌入式软件、传感器处理、电机控制和计算优化,为其提供了可靠且响应迅速的操作支持。
MCW 拥有端到端的嵌入式系统专业知识,涵盖传感器信号处理、嵌入式软件、实时感知算法以及高性能计算优化,助力平台在移动出行和交通运输应用中实现智能、自主和可扩展的功能。