MulticoreWare
MulticoreWare 是一家提供软件产品、解决方案和工程服务的全球技术公司。 我们对技术的热情一直是我们的动力! 我们与世界各地、各行各业的客户合作,改变每天使用和体验技术的方式。
我们出色的领导团队带来他们的热情和信念,以发挥作用。 我们庆祝我们的综合实力带来创新和思想领导力。
协作增强了敏捷思维和解决方案。我们与合作伙伴一起研究未来的技术,不断努力寻找解决最具挑战性的技术难题的方法。
我们相信“回馈”是一项持续不断的活动,它渗透到我们生活和互动的方方面面,不能被分割成一个项目或任务。
我们的服务包括在云架构、计算基础设施、基于RISC-V的处理器、GPU以及视觉和音频DSP上构建基于AI/ML/CV的平台。
我们在媒体和娱乐行业的重点领域是视频编解码器、视频工作流增强解决方案、视频AI/ML模块、视频分析、视频交付增强、视频加速和优化。
我们擅长于为ADAS中的毫米波雷达、激光雷达、视觉信号和传感器融合信号的处理提供创新和优化的解决方案。
我们提供广泛的服务,包括视频分析监控,基础设施维护、废物管理和智能交通管理。
我们通过工程服务来提供深度学习雷达技术,用于满足各种功能,如精确生命体征监测、高级跌倒检测、手势和行为识别等。
我们致力于实施工业4.0,将数字技术、自动化、数据分析和物联网纳入工业运营,如供应链优化、质量控制等。
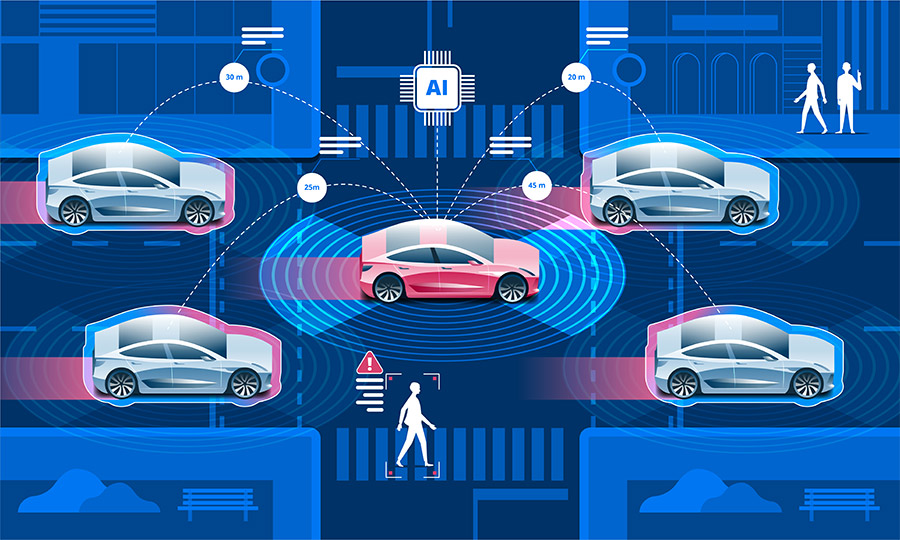
自动驾驶移动与智能汽车 端到端自主移动平台实现
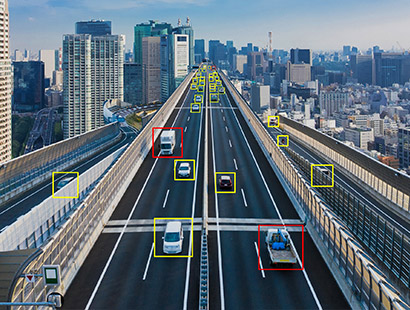
我们率先为新兴领域提供智能移动解决方案,利用我们在雷达、激光雷达和其他传 感器的自主感知方面的专业知识。在二维领域,我们专门从事二维物体检测和识别。 我们在感知任务中优先考虑精度和可靠性,扩展了我们的能力,使用感知转换器创建 鸟瞰图(BEV)模型,并通过应用于相机图像的神经网络进行车道检测。这使自动驾驶 汽车能够实时、准确地感知其环境,促进安全高效的导航。
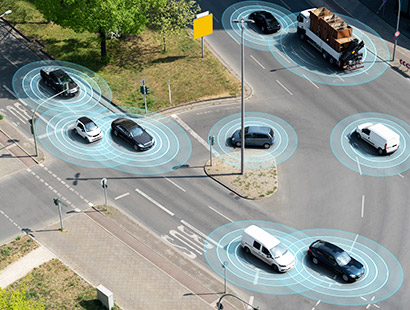
我们赋予我们的系统先进的能力来理解3D环境,这对确保自主导航和安全至关重要。 我们的优化算法的解决方案,包括BEV融合和点云,位于创新的前沿,提供了智能见解, 推动了自主移动的发展。
在MulticoreWare,我们专注于算法的制定和人工智能软件的微调,以有效处理 车载传感器数据并应对计算机视觉方面的挑战。我们通过同步定位和映射(SLAM) 解决方案,重点开发和优化基于雷达技术的感知算法。这些算法涵盖了广泛的 功能,包括多目标跟踪、传感器融合、雷达测距等,可针对各种应用进行定制。
观看视频,观察SLAM技术在自动代驾泊车中的应用。
Our team is happy to answer your questions. Please fill out the form and we will be in touch with you as soon as possible.
Select CountryAfghanistanAland IslandsAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua And BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahamas TheBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBosnia and HerzegovinaBotswanaBouvet IslandBrazilBritish Indian Ocean TerritoryBruneiBulgariaBurkina FasoBurundiCambodiaCameroonCanadaCape VerdeCayman IslandsCentral African RepublicChadChileChinaChristmas IslandCocos (Keeling) IslandsColombiaComorosCongoCongo The Democratic Republic Of TheCook IslandsCosta RicaCote D'Ivoire (Ivory Coast)Croatia (Hrvatska)CubaCyprusCzech RepublicDenmarkDjiboutiDominicaDominican RepublicEast TimorEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEthiopiaFalkland IslandsFaroe IslandsFiji IslandsFinlandFranceFrench GuianaFrench PolynesiaFrench Southern TerritoriesGabonGambia TheGeorgiaGermanyGhanaGibraltarGreeceGreenlandGrenadaGuadeloupeGuamGuatemalaGuernsey and AlderneyGuineaGuinea-BissauGuyanaHaitiHeard and McDonald IslandsHondurasHong Kong S.A.R.HungaryIcelandIndiaIndonesiaIranIraqIrelandIsraelItalyJamaicaJapanJerseyJordanKazakhstanKenyaKiribatiKorea NorthKorea SouthKuwaitKyrgyzstanLaosLatviaLebanonLesothoLiberiaLibyaLiechtensteinLithuaniaLuxembourgMacau S.A.R.MacedoniaMadagascarMalawiMalaysiaMaldivesMaliMaltaMan (Isle of)Marshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesiaMoldovaMonacoMongoliaMontenegroMontserratMoroccoMozambiqueMyanmarNamibiaNauruNepalNetherlands AntillesNetherlands TheNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorthern Mariana IslandsNorwayOmanPakistanPalauPalestinian Territory OccupiedPanamaPapua new GuineaParaguayPeruPhilippinesPitcairn IslandPolandPortugalPuerto RicoQatarReunionRomaniaRussiaRwandaSaint HelenaSaint Kitts And NevisSaint LuciaSaint Pierre and MiquelonSaint Vincent And The GrenadinesSaint-BarthelemySaint-Martin (French part)SamoaSan MarinoSao Tome and PrincipeSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSlovakiaSloveniaSolomon IslandsSomaliaSouth AfricaSouth GeorgiaSouth SudanSpainSri LankaSudanSurinameSvalbard And Jan Mayen IslandsSwazilandSwedenSwitzerlandSyriaTaiwanTajikistanTanzaniaThailandTogoTokelauTongaTrinidad And TobagoTunisiaTurkeyTurkmenistanTurks And Caicos IslandsTuvaluUgandaUkraineUnited Arab EmiratesUnited KingdomUnited StatesUnited States Minor Outlying IslandsUruguayUzbekistanVanuatuVatican City State (Holy See)VenezuelaVietnamVirgin Islands (British)Virgin Islands (US)Wallis And Futuna IslandsWestern SaharaYemenZambiaZimbabwe
(Max 300 characters)