作者简介
Kaviraj Sankar 是 MulticoreWare 移动与运输业务部的助理技术项目经理。他拥有雷达工程师的专业知识,在基于雷达点云的多目标跟踪、机器人堆栈和机器学习内核方面积累了宝贵的经验。
简介
汽车行业在自动驾驶能力方面取得了长足进步,其中汽车雷达发挥了至关重要的作用。通过整合人工智能(AI)技术,雷达系统在感知、准确性和安全性方面都有了大幅提升。
人工智能在汽车雷达中的关键作用:
- 智能物体检测和分类
- 信号处理和特征提取
- 实时适应和决策
- 物体跟踪和轨迹预测
传统的雷达信号处理方法包括从雷达前端获取模数转换 (ADC) 数据,计算一维 FFT(快速傅立叶变换)以获得测距范围,然后进行多普勒(获得速度)、方位角(获得水平方向的角度)和仰角(获得垂直方向)处理,最后提取点云。图 1 所示的流程用于大多数汽车雷达应用中。
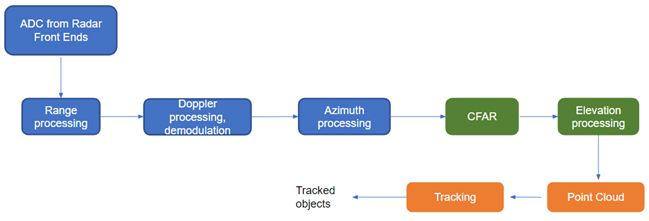
图 1. 雷达数据处理流水线
如果可以在 ADC 数据级别使用人工智能对物体进行分类和特征提取,这将有助于缩短计算时间,那会怎样呢?在本博客中,我们将探讨人工智能如何改变汽车雷达、提高其性能并实现更安全的自动驾驶。
雷达信号处理中的人工智能进步
利用无线电波探测和定位物体的雷达技术从人工智能和机器学习技术的应用中受益匪浅。以下是人工智能在雷达信号处理领域取得重大进展的一些应用案例:
- 增强目标跟踪
- 粒子过滤器适用于非线性和高斯跟踪场景。
- 基于深度学习的跟踪算法利用了 RNN(循环神经网络)和 LSTM(长短期记忆)网络。
- 自适应波束成形
- 强化学习用于实时采用波束模式。
- 利用波束成形的深度学习来拒绝干扰,我们采用了一种基于 CNN 的方法,该方法依赖于信号的 DOA(到达方向)。它通过验证来自特定方向的接收信号,学习传输下一组信号。
- 异常检测
- 单类 SVM 可用于识别雷达数据中的不规则或异常情况。其优点是在模型训练阶段不需要目标标签。
- 自动编码器用于无监督异常检测。
- 检测幽灵图像
- 利用深度学习选择认知雷达天线
- 雷达的分辨率取决于雷达中虚拟天线的数量。
- 天线数量越多,成本、体积和功耗就越大。这个问题可以通过使用 DNN 来解决,DNN 可根据环境使用少量虚拟天线发送自适应相位调制波形,从而提高分辨率。
现在我们将研究雷达信号分类,这是利用人工智能进行的重大改进之一,有助于在雷达数据处理的早期阶段解决多个问题。
雷达信号特征的多任务学习
传统的射频波形分类是使用基于似然法和基于特征的方法来实现的,这些方法需要有关信号特征的先验知识,因此无法有效地适应新信号。由于基于神经网络的方法不需要任何先验知识,因此一旦经过训练,就能以最小的计算能力完成特征描述。
用于无线电信号识别的深度神经网络(多任务学习器)可用于估算雷达传输的脉宽(TPW)、脉冲重复间隔(TPRI)、脉冲数(NP)和脉冲时延(TD),这有助于雷达信号的分类。
数据流和架构:
多任务学习器(MTL)框架用于解决雷达信号特征描述(RSC)这一联合优化问题。所提出的 IQST 与其他架构一样,可同时优化分类和回归任务。这将有助于从 IQ 数据中提取特征,尤其是在信噪比(SNR)较低的情况下。

图 2. 针对 RSC(雷达信号表征)提出的 MTL 架构,以 IQST 为骨干,然后是特定任务分类和回归头。
- 原始的 IQ 数据未经额外的预处理和特征变换即作为输入数据。
- 引入 IQST(IQ 信号变换器),如图 2 所示,它包括补丁嵌入技术,从原始 IQ 序列构建的 2×512 张量中生成一维补丁嵌入序列。
- 双通道 IQ 数据经过扁平化处理,然后应用密集线性投影。
- 然后将其传递到变换器编码器,该编码器采用 GELU 激活函数,并实现了 3 个多头注意块和 3 个编码器层。
- 输出作为特征图输入到每个特定任务的头部,以完成 MTL(多任务学习器)模型。
- 多任务部分包括一个内核大小为 3×3 的单卷积层和一个密集层。
- 上述各层的丢弃率分别为 0.25 和 0.5。
- 每个头部使用 ReLU 激活函数,在激活函数之前应用批量归一化。
- 最后一个头部采用 SoftMax 进行分类。
MTL 的模块化设计为在未来的工作中增加额外的分类和回归任务提供了机会,这将有助于减少传统信号处理链中的模块。
结论
人工智能技术的集成极大地推动了汽车雷达技术的发展,彻底改变了感知能力,提高了自动驾驶的安全性。通过智能目标检测和分类、改进的分辨率和范围估计、实时自适应波束成形、目标跟踪、轨迹预测、环境建模和快速适应不断变化的条件,人工智能在不断发展。我们可以期待汽车雷达的进一步增强,从而带来更安全、更高效的自动驾驶体验。
MulticoreWare 在汽车雷达领域的优势
- 在 x86 以及使用 DSP、HWA 和 ARM 内核的嵌入式平台上,拥有将 ADC 数据处理成点云的丰富知识。
- 能够在任何平台(尤其是 TI soc)上从头开始构建控制和数据路径流水线。
- 雷达数据的预处理和后处理,这些数据可输入机器学习模型,并针对边缘设备进行优化。
- 4. 拥有在 x86 和嵌入式平台上使用多对象跟踪器的经验。
如需了解更多信息,请通过 info@multicorewareinc.com 与我们联系